For my Integrated Real-world Project 1 (IRP1) module, we were required to design a catapult that was able to launch a projectile accurately as far as possible.
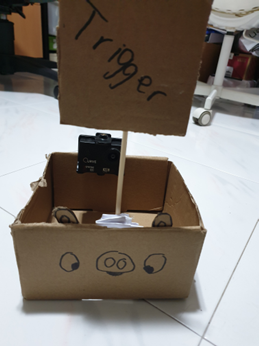
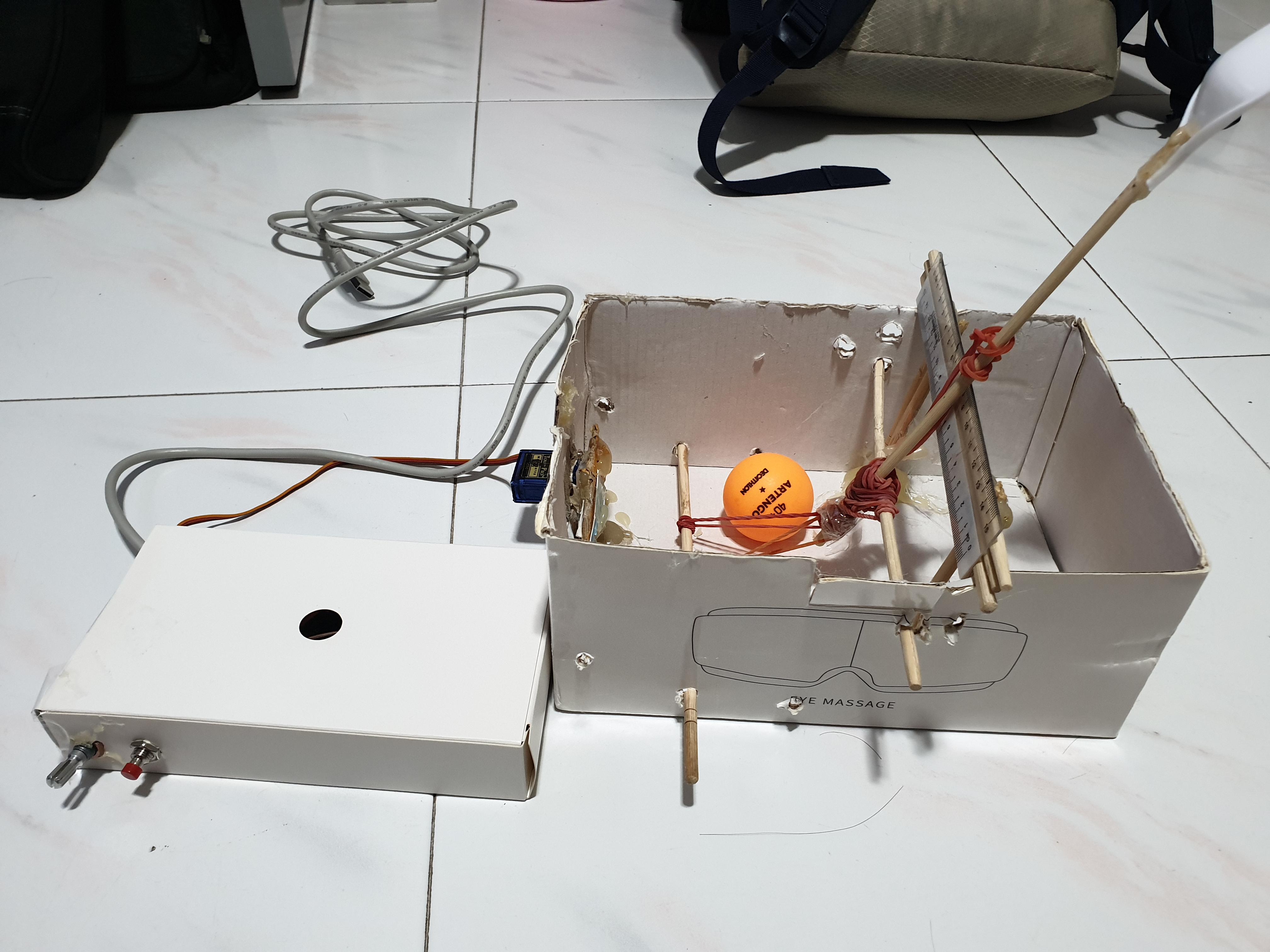
I designed a smart mangonel catapult powered by rubber bands. To control the launching arm, a servo motor connected to an Arduino is used. The user can operate the catapult by lowering the launching arm, rotating a knob and pressing a button, in order for the projectile to be launched.
The button allows the user to easily launch the projectile. The knob allows the user to adjust the strength of the launcher (by adjusting how low the launching arm would be pushed down), hence it would affect the initial velocity and motion of the projectile.
For this project, I had to keep on reiterating my design to be more accurate and allow the projectile to travel further. It encouraged me to think out of the box as I experimented with different methods and assessed their effectiveness. For example, I tried using a DC motor at first but it was not strong enough to hold down the launching arm, due to elastic potential energy from the rubber bands.